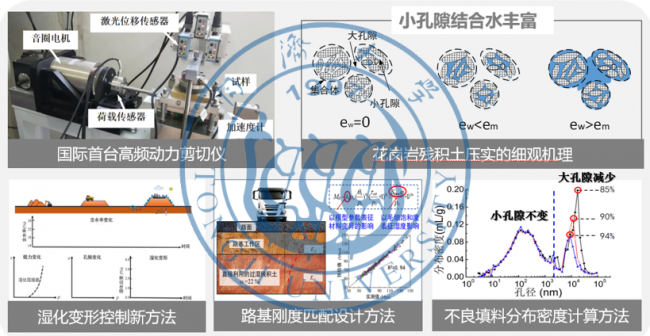
研究成果(一) 高速交通特殊土路基变形控制理论与修复技术
研制了土体性能演化系列实验仪器,揭示了特殊土变形的细观机理,提出了基于长期性能的路基变形控制理论和刚度匹配设计方法。
提出了紧邻路基施工的分区阻隔变形控制技术;研发了基于BIM+GIS+物联网的路基变形监测系统,实现了路基变位的智能防护。
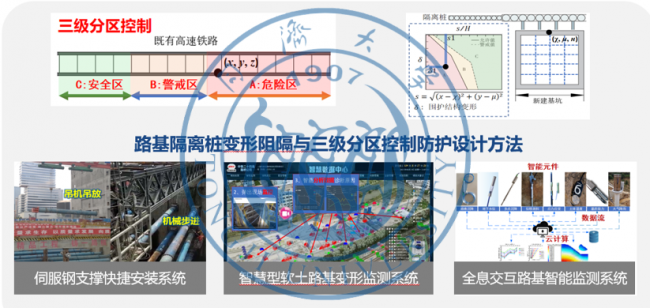
研发了路基分区注浆抬升技术与装备,提出了路基水平变形的释放-挤压联合修复方法,路基最大整体抬升11mm、水平纠偏67mm。

研究成果(二) 重载铺面耐久性设计与智能运维关键技术
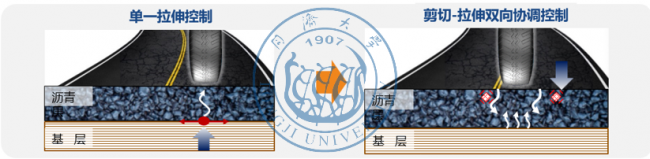
揭示了重载铺面剪切-拉伸双向致损机制,推动了路面耐久行为控制从单一拉伸控制向剪切-拉伸协同控制的转变。
创建了材料-结构-性能多尺度、全寿命一体化指标体系,形成了基于性能的重载铺面结构-材料一体化设计理论与方法。

研发了支持高频检测的轻量化路面性能巡检装备,实现了变形、裂缝等多维性能参数的快速精准感知。
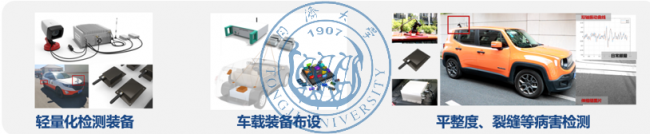
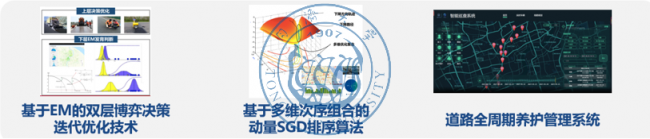
开发了数据驱动的智能养护对策优化技术,创建了云边融合的道路设施大数据管理系统与智能分析平台。
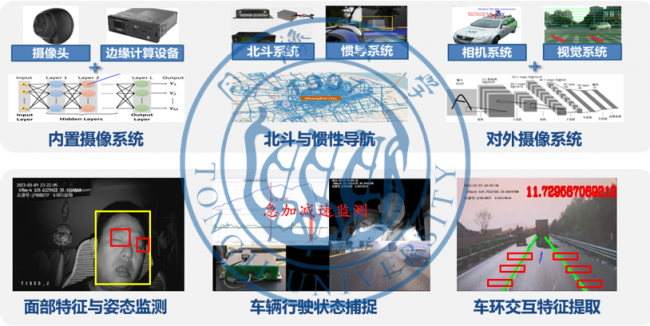
研究成果(三)交通安全行为风险主动管控关键技术
交通事故预防是世界性难题,风险主动管控是交通安全管理“由粗放到集约,由定性到定量,由被动到主动,由现象到本质”根本转变的核心。
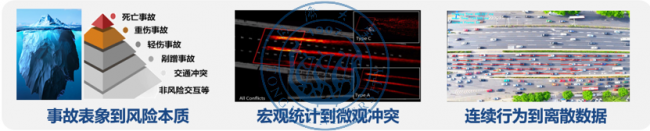
危险驾驶行为则是交通安全风险的最主要源头与防控关键。
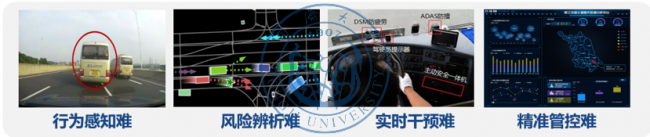
开发了多维驾驶行为多元融合采集技术,实现了车辆驾驶行为特征的全息提取,驾驶人面部与作业状态特征检出率高达98.2%。
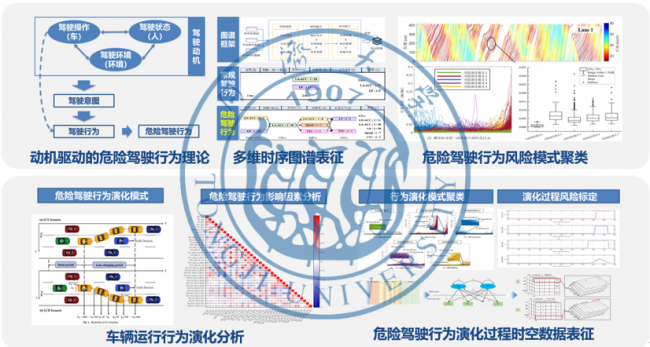
创建了动机驱动的危险驾驶行为理论与时序图谱分析方法,实现危险驾驶行为预测前置时间3s时预测准确度达96%、实时研判精度达97%。
提出了驾驶行为风险分级干预方法,研制了行为风险辨识与预警设备,建立了路-环多维风险广域综合管控系统,提升了运营车辆的安全运行水平与综合管控效率。

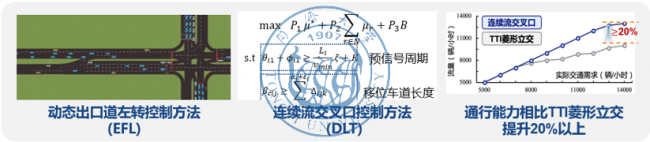
研究成果(四) 城市交通系统管控与服务数智化关键技术
提出了单交叉口通行能力静态空间动态复用策略,发明了基于预信号的EFL和DLT时空协同控制方法。
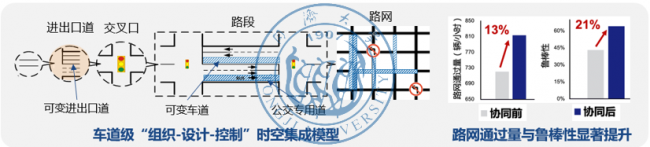
提出了路网全流向时空建模框架,建立了车道级“组织-设计-控制”时空集成控制方法。
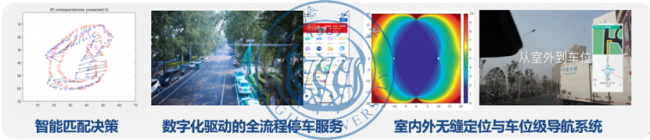
首创了基于异构多智能体仿真的停车均衡调控方法,研发了停车设施“布局-流线-调控”一体化优化设计软件。
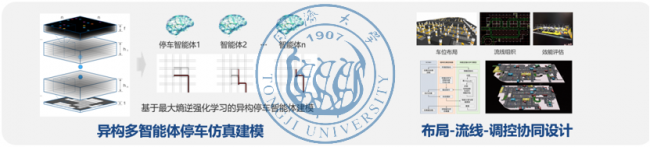
建立了面向有限网联环境的“车辆-泊位”智能匹配与行驶路径决策模型,开发了面向全流程停车服务的室内外无缝定位导航系统。
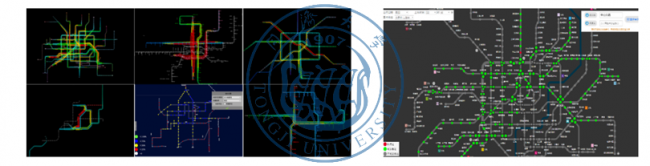
研发了超大城市轨道交通网络的多线路列车运行图协同编制方法。

研发了适用于超大城市轨道交通网络的运营辅助决策系统(NODS)
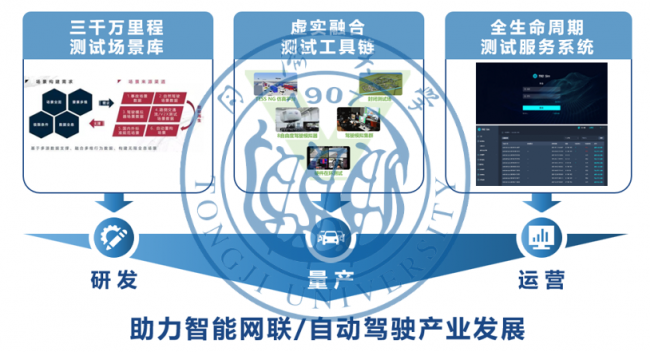
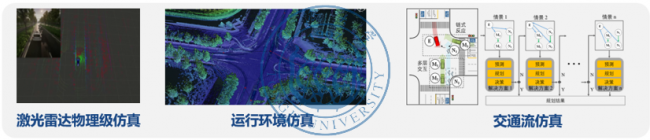
研究成果(五) 智能网联场景感知与自动驾驶虚实融合测试理论及方法
发明了交通状态精确检测的3D机器视觉框架和易边缘部署的轻量算法族。

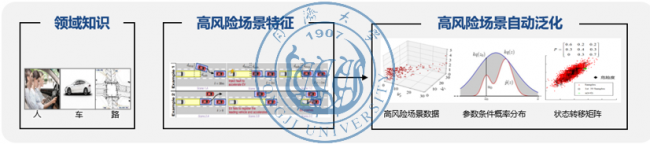
提出了领域知识和数据驱动融合的场景要素自动化解析与靶向派生方法。
发明了传感器-运行环境-车辆动力学-交通流全要素仿真技术。
提出了实车-仿真多体孪生测试与海量场景加速测试方法。
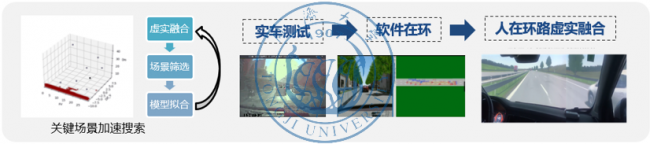
建立了高覆盖度场景库、虚实融合测试工具链和全生命周期测试服务系统。